c
< 0
c = 0
(the projection is the zero vector)
c
> 0
These examples look at the kinaesthetic effects of dragging part of a diagram around. I think that the reason they work is that dragging is close to our earliest form of learning as a baby: manipulating objects by hand. Though we eventually learn to learn other ways, direct manipulation remains a very powerful and elemental method of understanding the world.
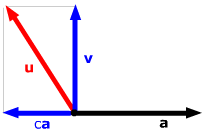
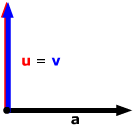
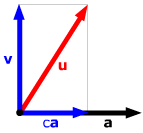
The orthogonal projection of a vector onto a line is its "shadow" with respect to light shining perpendicular to the line. The original version of this introduction consisted of three diagrams:
| |
|
|
| c
< 0 |
c = 0 |
c
> 0 |
As with other diagrammatic presentations, there is still the need to scan all three pictures to integrate them. In this particular sequence, there is another confounding element: the labelling and auxiliary vectors needed to derive the formula for a projection are included in the diagrams, making perception of just what a projection is more complicated.
The dynamic version presents only the elements necessary to understand the concept. The arrows on top are meant to represent light shining perpendicular to the line. The red vector is draggable (drag its head) and can be used to investigate different configurations of vector and line. (For example, students could be asked "which vectors project onto themselves? which project onto the zero vector? and so on.)
Once the students have investigated what projections look like (or "feel" like, perhaps?), the formula for a projection can be derived using a single, labelled static diagram:
 |
The basic idea here is to show that the span of two non-parallel vectors is the plane containing them.
The static version is relatively complicated to read and understand. It's also a bit of a con; it ignores the case that w is parallel u or v, whose consideration would make the argument even more complicated.
 |
Suppose we have two no-parallel vectors u and v. Look at any other vector w in the plane. |
 |
Draw lines through the tip of w parallel to u and v. These lines and the lines of u and v form a parallelogram. The vectors along the sides of this parallelogram through the origin are scalar multiples of u and v. These scalar multiples sum to w, so w is in the span of u and v. |
| You can get any vector w in the plane this way, so the subspace spanned by u and v is the whole plane. |
|
The dynamic version (drag the head of the purple vector) shows almost immediately and without symbols that any vector in the plane of u and v is a linear combination of u and v. (Some initial verbal prompting would still be necessary.) To cement their understanding, students could be asked to investigate auxiliary questions, like "which coefficients would produce the vector 3i - 4j" or "how would you describe geometrically vectors for which both coefficients are negative?" and so on.
Even if it is required that students be able to construct arguments like the static one above, playing with the dynamic version first would strengthen their repertoire of visual images from which to abstract such arguments.