The answer is yes, but we have to clear up a few technical details first.
v = i + 3j +5k has different components with respect to the two sets: [1, 3, 5] with respect to {i, j, k} and [1, 5, 3] with respect to {i, k, j}.
If we want the component representation of vectors to be unambiguous, we need to assume (at least when talking about components) that all bases are in fact ordered sets of vectors - i.e. the order of the vectors in a basis matters, and bases with the same vectors but in different orders are in fact different bases.
Suppose you have an ordered basis {b1, b2, b3} in 3-space, and suppose there were a vector v in 3-space with
v = p1b1 + p2b2 + p3b3
for one set of scalars p1, p2 and p3, and
v = q1b1 + q2b2 + q3b3
for another set of scalars q1, q2 and q3. Subtract the two equations:
0 = (p1 - q1)b1 +(p2 - q2)b1 +(p3 - q3)b3.
But {b1, b2, b3}
is a basis, so the vectors b1, b2, b3 are
linearly independent. This last equation is a linear dependence relation
among
b1, b2 and b3,
so its coefficients must all be 0:
p1 - q1 = 0, p2 - q2 = 0, p3 - q3 = 0.
Then p1 = q1, p2 = q2, p3 = q3, so in fact, the two representations for v are really the same. The same argument works in 2-space, so in general, no vector can have more than one representation in terms of a given basis.
If B = {b1, b2} is an (ordered) basis of 2-space and v = c1b1 + c2b2 is any vector in 2-space, then the components of v with respect to B are defined to be
[v]B = [c1, c2].
If B = {b1, b2,
b3}
is an (ordered) basis of 3-space and
v = c1b1 +
c2b2 +
c3b3 is any vector
in 3-space, then the components of v with
respect to B are defined to be
[v]B = [c1, c2, c3].
v = pb1 + qb2, w = rb1 = sb2
and
v + w = (p + r)b1 + (q + s)b2
i.e.
[v + w]B = [p + r, q + s].
The same sort of calculation works in 3-space, and for scalar multiples as well. In general: to find the components of the sum of two vectors, add their components pairwise. To find the components of a scalar multiple of a vector, multiply the components of that vector by the scalar.
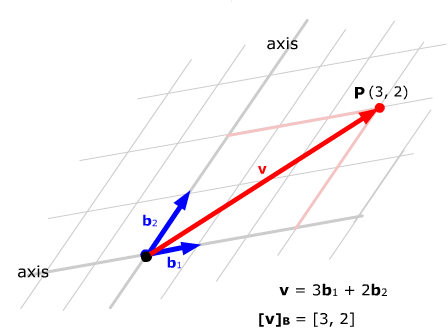
Now that we have different bases for 2-space, we can reverse this process and use the vectors of any basis to define a coordinate system. The idea: choose two lines through the origin along the basis vectors as coordinate axes. Use the basis vectors to define a unit coordinate along each axis. Optionally, set up a coordinate grid using lines parallel to the two axes. Then, to assign coordinates to any point in 2-space, look at the point's position vector and represent the point by the components of that vector in the new basis. Use those components as the coordinates of the point.
In the picture below, the point P has coordinates (3, 2) with respect to the coordinate system defined by the basis B = {b1, b2}.
Bases and Coordinate Systems |
|||
| Introduction | Definition of a basis | Basis-defined coordinate systems | Orthogonal and orthonormal bases |