Like lines, planes can be described by giving
two pieces of information: a point on the plane (the initial
point) and a normal
vector - a vector perpendicular to the plane.
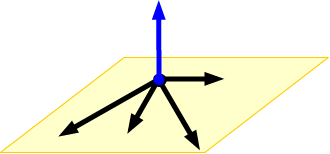
The normal vector fixes the orientation of the plane: all vectors which lie in the plane must be orthogonal to it.
The initial point fixes the location of the plane, and distinguishes it from all the other planes with the same normal vector (which are all parallel to each other).
In the diagram, the plane is fixed. You can change the length
of the normal vector to the plane by dragging its head, and change its location
by dragging its tail. You can also move the initial point anywhere on the
plane.
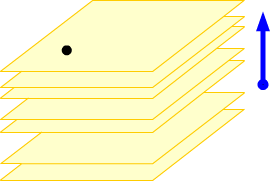
The normal vector and initial point for a plane
are not unique: any non-zero scalar multiple of a given normal vector will
work just as well to describe the plane, and the initial point can be any point
on the plane. Suppose that, in some coordinates system, the
normal vector is n and the initial point has position vector r0.
For a generic point on the plane with position vector r, look at the vector
Suppose that, in some coordinates system, the
normal vector is n and the initial point has position vector r0.
For a generic point on the plane with position vector r, look at the vector r - r0.
It lies completely in the plane, so it's orthogonal to the normal vector:
n•(r - r0) = 0.
This equation is know as the point-normal form of the equation of the plane. It can also be written in the form n•r = n•r0 (expand the dot product and rearrange). Note that this equation is a scalar equation. In the next section, we'll expand this equation into a "standard" form.
| Introduction | The point-normal form of a plane | The standard equation of a plane | The vector equation of a plane | Finding planes |